开发者社区
具身之家社区
—— 新结构颠覆传统机械手
2026-06-04 09:43:40
在人形机器人从 “能走” 迈向 “能用” 的产业拐点,末端执行器 —— 灵巧手,已成为决定通用化落地的核心瓶颈。开普勒机器人为其 Forerunner 系列全尺寸人形机器人打造的 12 个主动自由度灵巧手,以 “工业级强度 + 仿生级灵活” 的双轮定位,在国产灵巧手阵营中走出一条差异化路径。这款单手 12 主动自由度、集成高密度触觉阵列、支持毫米级力控与 15kg 级负载的末端执行器,既不是追求极致仿生的实验室原型,也不是简化功能的工业夹爪,而是在 “性能、成本、可靠性” 的行业不可能三角中,寻找平衡的工程化产物。..
——
2026-06-02 14:37:03
2026 年,具身智能行业正式进入资本退潮、行业清场、技术收敛的下半场。上半场靠 “炫技 demo + 估值故事” 融资的时代彻底终结,资本从 “撒网式布局” 转向 “精准押注能落地、能造血、能构建长期壁垒的技术路线”。..
——
2026-06-02 14:32:46
人类面对现实世界时,很多决策不靠缜密逻辑推演,而是源于日积月累形成的物理直觉:松手杯子必然下坠、满瓶水更难提起、猛拧薄壁玻璃瓶容易碎裂,这类无需反复试错、瞬间预判结果的本能,正是长期困扰传统机器人的能力短板。..
——
2026-06-02 11:50:27
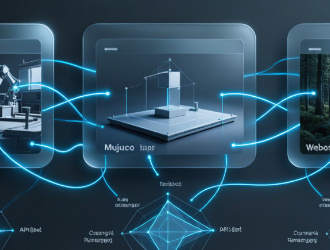
在具身智能的工业化落地进程中,Sim‑to‑Real(仿真到现实)鸿沟始终是横亘在算法与真机之间的最大障碍:仿真里完美收敛的策略,部署到实体机器人上往往直接失效。其根源在于仿真与现实在视觉保真、物理精度、动力学一致性、传感器噪声、执行器延迟五大维度的系统性差异。而仿真平台正是弥合这一鸿沟的核心基础设施 —— 它不仅是虚拟训练场,更是连接数字世界与物理世界的 “校准器”。..
——
2026-06-02 11:45:52
但凡经历过移动互联网、服务器软件迭代的开发者都清楚一个铁律:真正定义一个产业终局的,从来不是终端产品,而是统一的开源底层基座。服务器领域的Linux、移动端的Android、嵌入式的RTOS,无一不是通过开源开放、社区共建、软硬件全适配的模式,终结碎片化乱象,构筑起整个行业的技术标准与生态壁垒。..
——
2026-06-02 14:24:03
长期以来,机器人开发是典型的高门槛、长周期、强定制工程。想要让机械臂拧一颗螺丝、让服务机器人收拾桌面、让人形机器人完成物料分拣,开发者必须熟练掌握ROS生态、运动学建模、轨迹规划、SLAM导航、力控调参、行为树逻辑编写等全套技术。..
——
2026-06-02 11:28:59
强化学习(RL)的核心魅力,是让智能体自主试错、自主进化。不同于监督学习依赖标注数据的被动拟合,强化学习通过“探索-犯错-奖励-迭代”的闭环,在持续试错中习得最优策略,完美契合具身智能适配非结构化物理场景的核心需求。..
——
2026-06-02 16:30:00
在开发者圈层已经形成共识:纯大模型驱动的机器人方案,已经摸到了落地天花板。无论是端侧部署的VLA模型,还是ROS 2+LLM的外挂式架构,都逃不开三大致命问题:物理常识幻觉、场景泛化能力弱、无法持续在线进化。..
——
2026-06-02 11:16:09
在AI行业长期存在一个极具反差的认知悖论:AI早已轻松攻克人类顶级智力壁垒——围棋、国际象棋、星际争霸等策略博弈游戏,实现全方位碾压人类顶尖选手;但面对人类随手完成的日常小动作,比如拧灯泡、旋瓶盖、插拔插头、拧紧螺丝,主流机器人与AI系统却依旧频繁翻车。..
——
2026-06-02 11:10:29
过去三年,AI行业长期沉浸在「纯软件AGI」的浪漫幻想中。业界普遍信奉:只要模型参数足够大、文本语料足够多、上下文窗口足够长,纯粹基于算力与数据堆叠的大语言模型,就能无限逼近、最终超越人类通用人工智能,实现全场景通用推理、自主认知与通用决策。在这套范式下,智能被定义为抽象符号的运算、关联与生成,身体、物理交互、环境感知、动态反馈都被视作非必要冗余,属于可剥离的外围载体。..